Weltraum-Roboter liefern sich Duell
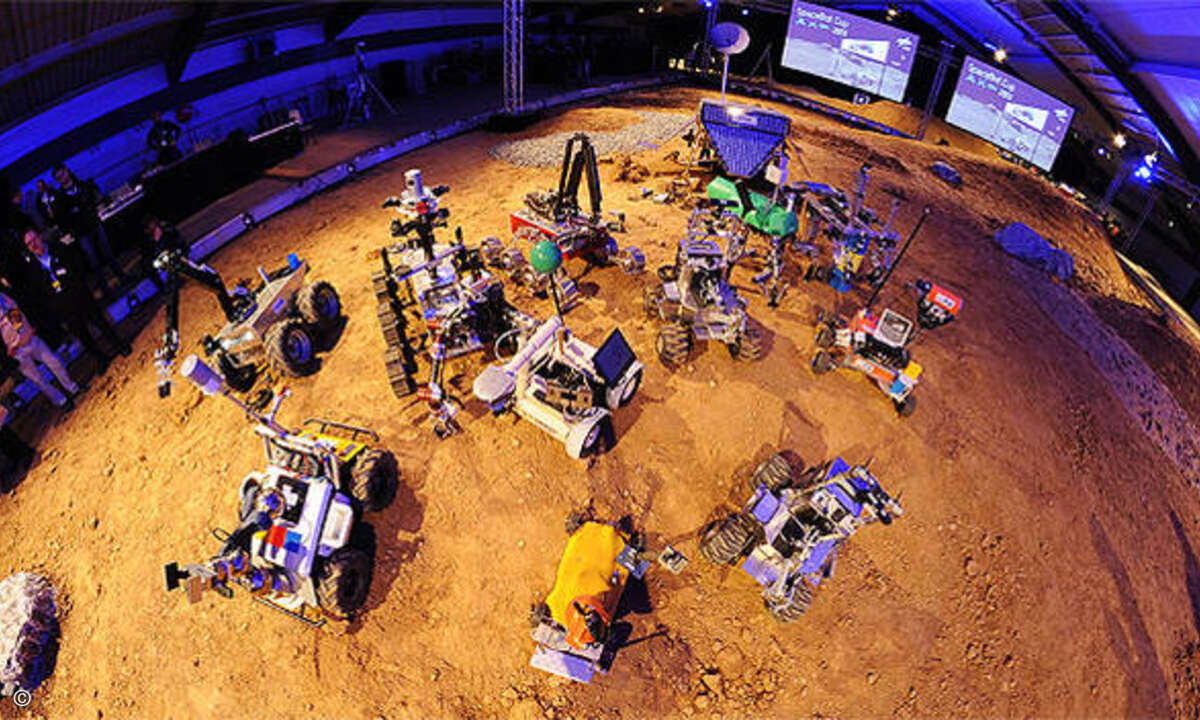
Vom 11. bis 12. November fand erstmals der DLR SpaceBot Cup statt. Zehn Teams erkundeten mit ihren Roboter eine außerirdische Planetenlandschaft um die Wette. Die Aufgaben: Auffinden, identifizieren, transportieren und montieren von Objekten. Doch jedes Team scheitert.
- Weltraum-Roboter liefern sich Duell
- Sechs Monate und 50.000 Euro für die Roboterentwicklung
--- canonical[http://www.elektroniknet.de/automation/sonstiges/artikel/102885/] ---Sand, Geröll, Gestein, sprich: Unwegsames Gelände. Die Rheinbreitbacher Supercrosshalle bei Bonn erinnerte am 11. und 12. November eher an eine Marslandschaft als an eine Motorcross-Strecke. Hier trafen sich zehn Teams aus Wissenschaft und Industrie zum ersten »SpaceBot Cup« des Deutschen Zentrums für Luft- und Raumfahrt DLR. Doch leider gab es keine Gewinner: Jedes Team scheitert am Missionsziel.
Doch Verlierer gab es nicht: Zwar wurden die gestelltenAufgaben von keinem Team erfüllt, jedoch wurde laut Veranstalter das Wettbewerbsziel erreicht, nämlich der Raumfahrt-Robotik neue und innovative Impulse zu geben.
Die Aufgabenstellung
Das Wettbewerbsszenario spiegelt die Herausforderungen an Erkundungs-Robotern nach der Landung auf einem fremden Planeten wieder. Als Startpunkt des Parcours dient ein Nachbau eines Landefahrzeugs. Von dort aus beginnt das System bestehend aus einem oder mehreren Robotern damit, die Umgebung zu erkunden, um auffällige Objekt zu erkunden. Vor dem Start bekommen die zehn Teams eine grobe Umgebungskarte mit Höhenprofil ausgehändigt. Die Selbstlokalisation und die Navigation des Robotersystems erfolgt GPS-frei. Ebenso darf der Roboter seine Umwelt ausschließlich über die im System verfügbare Sensorik erfassen. In der Entwicklung des Erkundungssystems mussten die Teams jedoch darauf achten, dass ein Gesamtgewicht von 100 kg nicht überschritten wird.
Gesteuert wird der Roboter über eine »Bodenstation auf der Erde«. Das heißt: Das Betriebsteam hat keinen direkten Zugriff und auch keine direkte Sicht auf das Robotersystem. Der Informationsaustausch zwischen Roboter und Station erfolgt ausschließlich über eine Telekommunikationsverbindung. Da sich das Wettbewerbsszenario an der Realität orientiert, kommt es während des Informationsaustauschs zu Zeitverzögerungen und natürlich auch zu Kommunikationsausfällen.